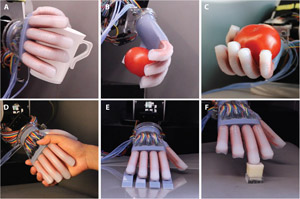
Des chercheurs de l’Université Cornell ont conçu un guide
d’onde optique flexible qui sert de capteur de force et de contrainte dans une
main robotisée souple. La main peut détecter rapidement et avec précision les
textures, modifier la force appliquée sur les objets délicats et suivre en
permanence sa trajectoire.
Les chercheurs, qui ont publié leur travail dans la revue
Science Robotics, ont déclaré que les robots peuvent utiliser le sens du
toucher que leur apporte le capteur de force pour changer leur façon de se
déplacer en fonction des stimuli externes issus de leur environnement. Cette
polyvalence pourrait être particulièrement utile chez les robots industriels
pour effectuer des opérations de pick-and-place
dans des environnements non uniformes ou en constante évolution. Il pourrait
également aider à créer des neuro-prothèses sensibles, qui communiquent avec le
cerveau de la personne appareillée.